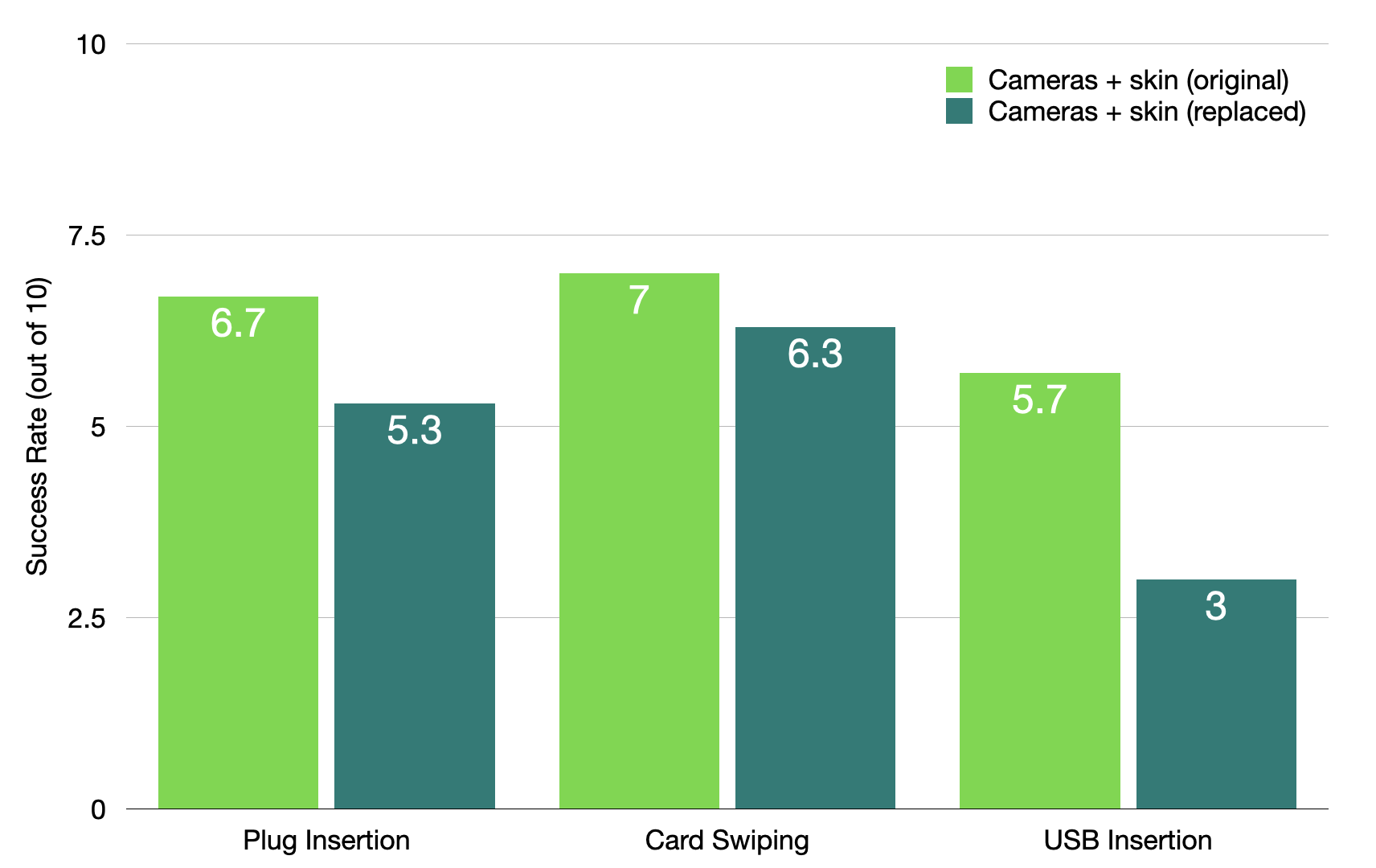
In the videos below, you can see that learned Behavior Cloning policies remain successful for three tasks even when the skin is replaced.
Abstract
While tactile sensing is widely accepted as an important and useful sensing modality, its use pales in comparison to other sensory modalities like vision and proprioception. AnySkin addresses the critical challenges of versatility, replaceability, and data reusability, which have so far impeded the development of an effective solution.
Building on the simplistic design of ReSkin, and decoupling the sensing electronics from the sensing interface, AnySkin simplifies integration making it as straightforward as putting on a phone case and connecting a charger. Furthermore, AnySkin is the first sensor with cross-instance generalizability of learned manipulation policies.
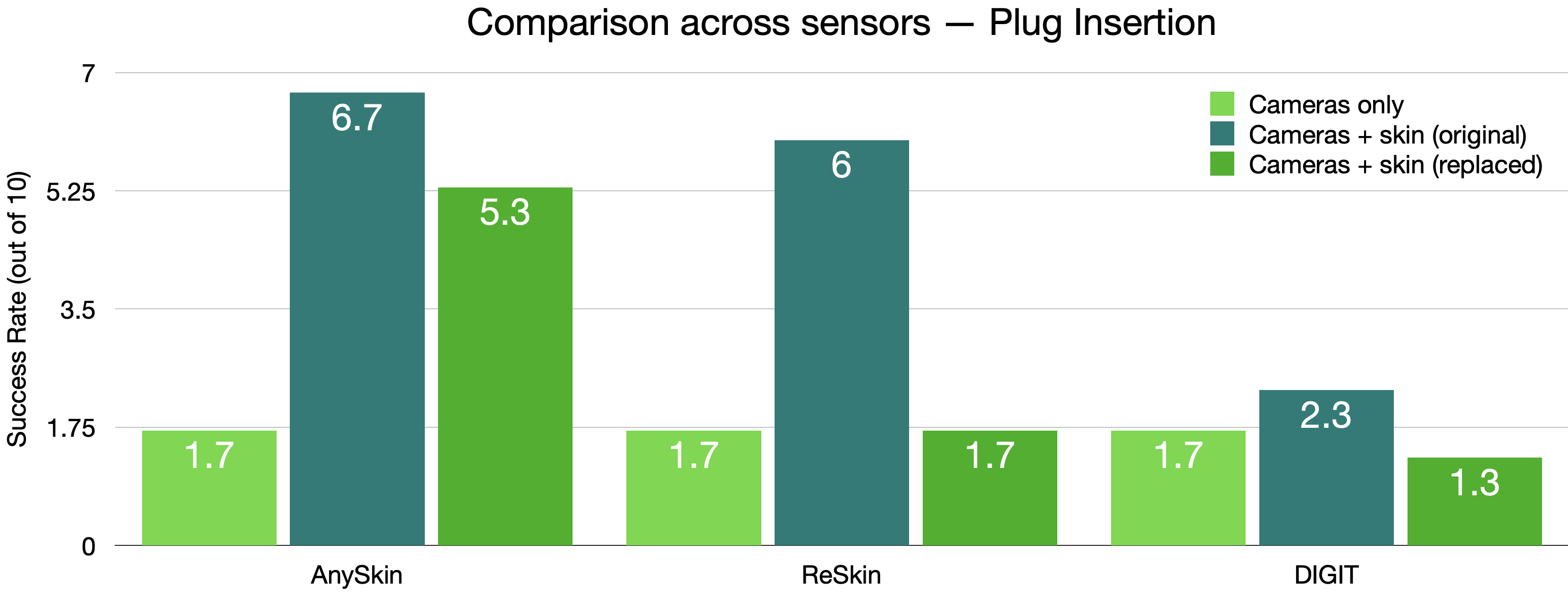
This work makes three key contributions: first, we introduce a streamlined fabrication process and a design tool for creating an adhesive-free, durable and easily replaceable magnetic tactile sensor; second, we characterize slip detection and policy learning with a AnySkin sensor; and finally, we demonstrate the generalizability of models trained on one instance of AnySkin to new instances, and compare it with popular existing tactile solutions like DIGIT and ReSkin.
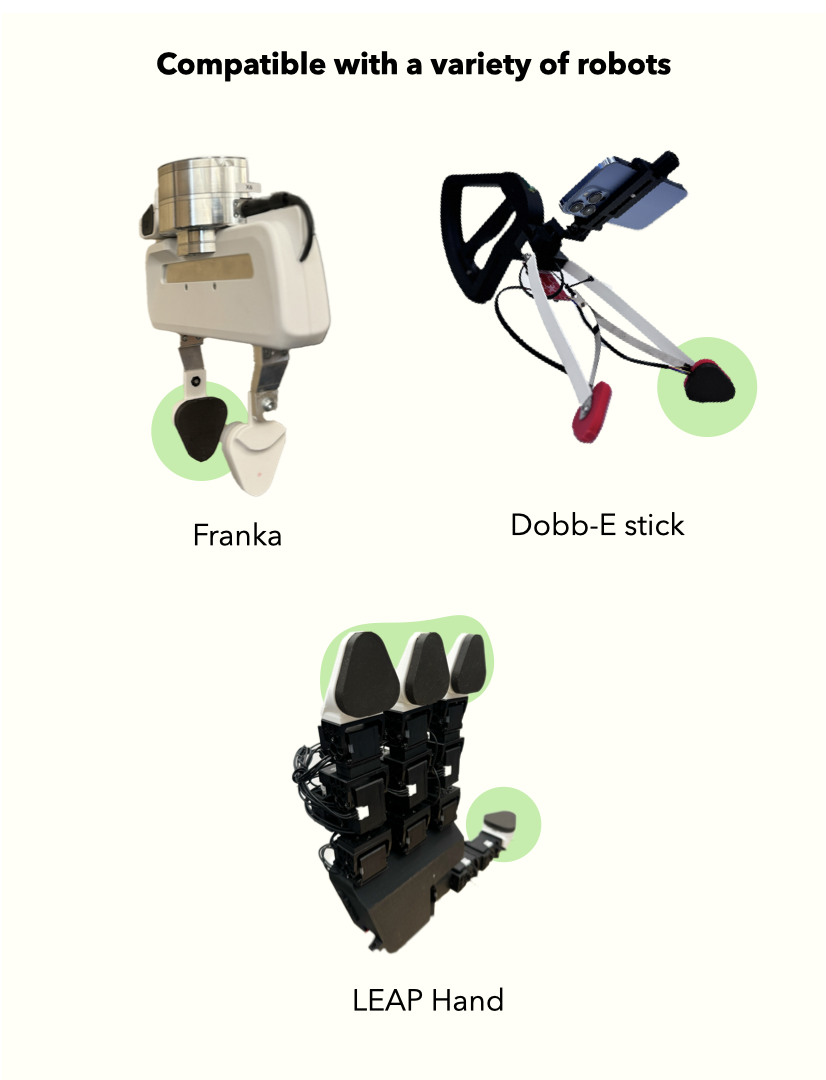
We present AnySkin, a skin sensor made for robotic touch that is easy to assemble, compatible with different robot end-effectors and generalizes to new skin instances.
AnySkin senses contact through distortions in magnetic field generated by magnetized iron particles in the sensing surface. The flexible surface is physically separated from its electronics, which allows for easy replacability when damaged.
Policy Learning and Skin Replacability
Card Swiping
Plug Insertion
USB Insertion
Cross-Instance Generalization Results
Slip Detection
AnySkin can be used to detect slippage of grasped objects. Our LSTM model, trained with data from 30 daily objects, are able to predict slip events with 92% accuracy.
Raw Signal Visualization
Sensing electronics consist of five magnetometers measuring magnetic flux density in three axes. The following video shows a visualization of the raw AnySkin signal:
Experiment Results
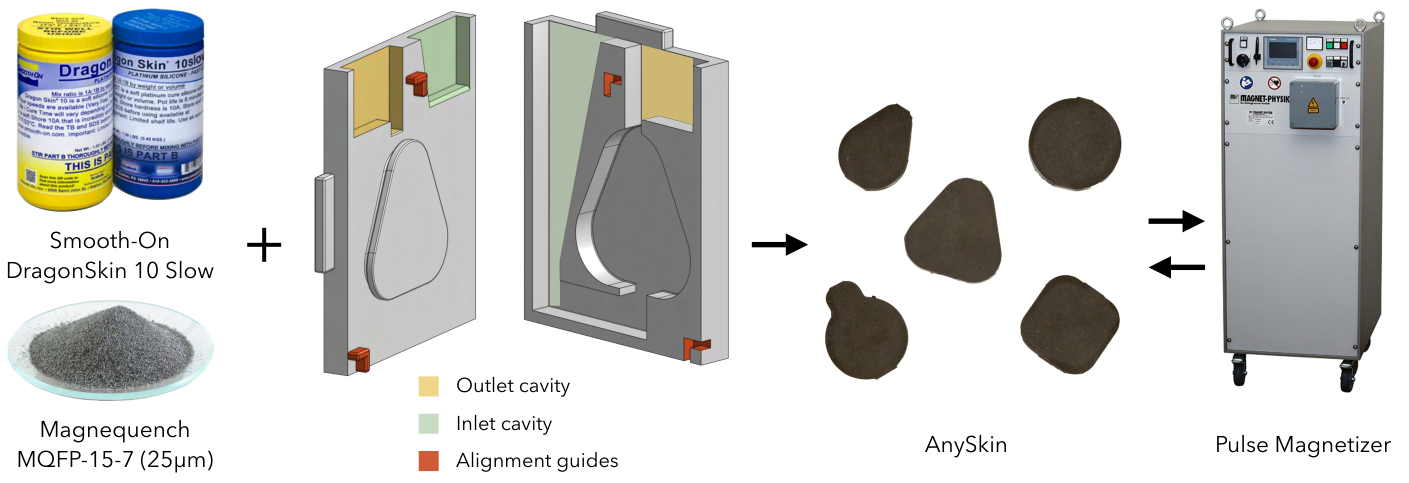
Fabrication Process
AnySkin is made by mixing Smooth-On DragonSkin 10 Slow and MQFP-15-7(25μm) magnetic particles in a 1:1:2 ratio, and curing it in the two-part molds shown above. Cured skins are magnetized using a pulse magnetizer. Our gripper tips' design files are open source and available here.
AnySkin is made by mixing Smooth-On DragonSkin 10 Slow and MQFP-15-7(25μm) magnetic particles in a 1:1:2 ratio, and curing it in the two-part molds shown above. Cured skins are magnetized using a pulse magnetizer. Our gripper tips' design files are open source and available here.